近日,根據《工業和信息化部辦公廳關于開展先進適用技術第一批遴選工作的通知》公布名單顯示,西北工業大學自動化學院樊澤明教授團隊研發的“非結構化環境中基于視覺的輪/履式人形機器人”技術成功上榜,是陜西省唯一上榜技術。這一技術標志著我校在機器人技術領域取得了重要突破。
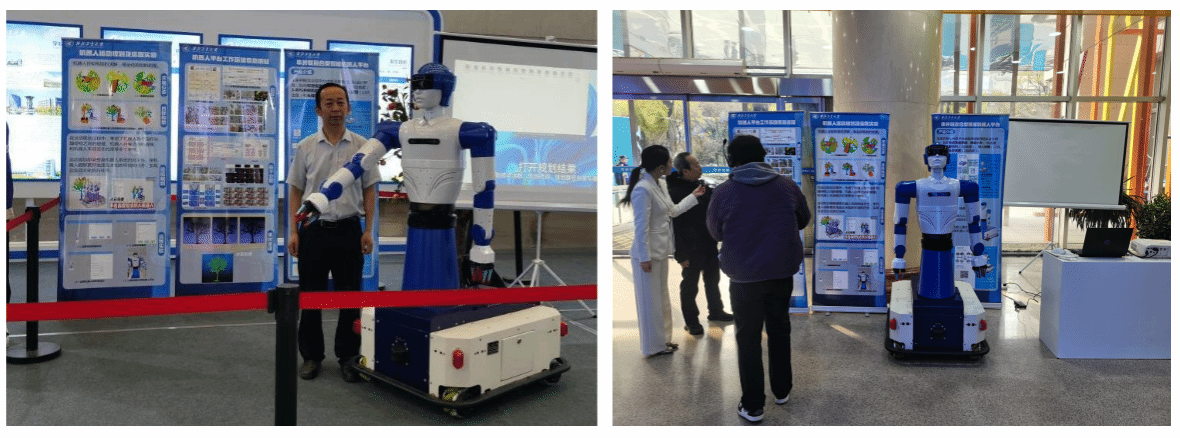
該技術是樊澤明教授團隊歷時15年攻關的創新成果,包含機器人本體、非結構化環境以及機器人與環境集成的一套完整系統,能夠代替人類完成復雜作業。其核心優勢在于成功解決了輪式人形機器人在非結構化環境中的四大關鍵技術問題。本技術將人工智能技術和機器人技術無縫銜接:基于神經網絡 “目標識別”及“位姿定位”的“學習與識別相互協同”功能;基于深度學習“環境識別”及“三維重構”的“認知與感知優化集成”功能;基于強化學習“路徑規劃”及“軌跡控制”的“柔順控制和手眼協調有機融合”功能。賦予輪/履式人形機器人“識、智、思、控、動、感、認、學”類人八大能力,打造了具有俱身智能功能的類人自主作業機器人。
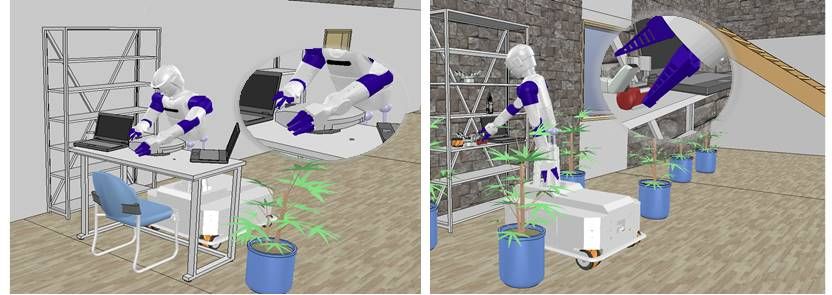
在實際工程應用中,限于現有全球腿式人形機器人技術水平,本機器人技術在穩定性、快速性、承載力、全身協調、非結構化環境交互力均優于腿式人形機器人,該機器人在非結構化環境中能代替人在多領域進行類人作業,填補了該類人形機器人系統的國內外空白。
該輪/履式人形機器人在穩定性、承載力及非結構化環境交互能力方面優于現有的腿式人形機器人,能夠在非結構化環境中替代人類進行多領域類人作業,填補了該類人形機器人系統在國內外的技術空白。該技術已成功應用于教育、農業等領域,未來有望在制造、國防安全、智能服務、智慧醫養等行業推廣應用。
樊澤明教授團隊的技術成果不僅在學術領域取得了豐碩的成果,同時也在社會應用中產生了廣泛影響。團隊已出版3部專著和6部教材,其中一部專著獲得國家出版基金支持。此外,團隊還在國際期刊上發表SCI論文60余篇,獲得省部級以上獎項5項。基于該技術的領先地位,中國國際技術促進會已立項制定《非結構化環境中基于視覺的輪/履式人形機器人規范》團體標準,推動技術規范化與普及化。
未來,將繼續深耕機器人技術領域,推動更多創新成果落地,為社會發展和人類進步貢獻西工大智慧。
(審核:王小旭)




